Совмещенные микрофонные стереосистемы
Раздел 9.2 из книги В.А. Никамин "Многоканальные звуковые системы, СПб, 2017, 184 с.
 403.4к
403.4к
Под термином «виртуальный ультразвуковой микрофон»понимают не совсем микрофон, если иметь в виду микрофон как прибор некоторого вполне определенного типа, а способ регистрации звуковых колебаний как результата модуляции этими колебаниями ультразвуковой волны. При этом приемником модулированной ультразвуковой волны может служить, к примеру, обычный конденсаторный микрофон, способный работать в соответствующем диапазоне частот. Или перспективный графеновый. Поскольку микрофон, непосредственно воспринимающий звуковые колебания, здесь отсутствует, система получила название виртуальной
Принцип работы виртуального ультразвукового микрофона можно понять из схемы эксперимента, приведенной на рис. 9.1

В этом эксперименте, проведенном группой исследователей из Германии, с помощью массива из 14 пьезокерамических излучателей был сгенерирован остронаправленный пучок ультразвуковых волн с постоянной амплитудой и с частотой 40 кГц
Степень модуляции не зависела от уровня абсолютного давления ультразвуковой волны. Разница между амплитудами несущего сигнала и бокового (около 60 дБ на рис. 9.2) при изменении амплитуды ультразвуковой волны не менялась.
9.1. ПРИНЦИП ДЕЙСТВИЯ ВИРТУАЛЬНОГО МИКРОФОНА
Модуляция ультразвуковых волн возникает вследствие того, что звуковые волны при пересечении ультразвукового луча приводят к колебаниям скорости звука на пути распространения L ультразвуковой волнына величину Δc (рис. 9.1). Причинами изменения скорости звука являются:
●движение частиц воздуха, вызванное низкочастотнойзвуковой волной;
● колебания средней плотности воздушной среды
Колебания скорости звука Δcm, обусловленные движением частичек воздуха
Распространение звуковой волны ωa в воздушной средехарактеризуется движением частиц воздуха. Скорость частиц воздухаvaзадается выражением
v_a=pa/(ρ_0 c_0 )
9.2. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
ВИРТУАЛЬНОГО МИКРОФОНА
Для измерений в процессе проведения экспериментальных исследований свойств виртуальных микрофонов, как уже говорилось, была использована схема, показанная на рис. 9.1.
Длина пути, по которому распространяется ультразвуковая волна,здесь значительно больше, чем длина звуковой волныλa. Поэтому величина изменения скорости звука в каждой рассматриваемой точке зависит от ее фактической позиции x вдоль линии между массивом излучателей (передатчиком) и микрофоном (приемником):
∆c(x,t)=(2 cos〖(α(x))+γ-1〗)/(2ρ_0 c_0 )∙p_a (x,t) (9.5)
Угол α между направлениями распространения звуковой и ультразвуковой волн также является функцией от рассматриваемой позиции х на пути ультразвукового луча. Чтобы получить выражение для полного изменения скорости звука (выраженного как сдвиг фазы Δϕ(t)), уравнение (10.5) должно быть проинтегрировано вдоль всей длины пути L распространения ультразвукового луча:
∆ϕ(t)=∫_0^L▒1/(c_0+∆c(x,t+x/c_0 ) ) dx-L/c_0 (9.6)
Зависимости величин Δϕ(t) от частоты, полученной в ходе эксперимента по схеме, представленной на рис. 9.1, и вычисленной с помощью (9.6), показанынарис. 9.3.
На рассчитанной характеристике видна легкая рябь, и поведение ее сходно с поведением частотной характеристики фильтра низких частот первого порядка. Для проверки расчетов,эксперимент был проведен заново, но в качестве звукового сигнала использовался сигнал скользящего тона от 100 Гц до 10 кГц длительностью 5с и уровнем 80 дБ.Записанный микрофоном ультразвуковой сигналзатем был демодулирован для получения значений звукового давления на каждой частоте. Полученный результат также представлен на рис. 9.3. Наблюдается хорошее сходство теоретических и практических результатов. Различия на низких частотах объясняются переходными характеристиками в источнике звука. Поскольку степень модуляции очень низкая (величине 0 дБ соответствует эффективный фазовый сдвиг всего на 1,23 нс), в результатах, полученных путем измерения, отмечается довольно высокий уровень шумов.
где pa – давление окружающей среды;
ρ0 – равновесная плотность воздуха;
с0 – скорость звука в воздухе.
Изменения скорости ультразвуковой волны ωu, обусловленные воздействием акустических колебаний равны
Δc_m= v_a cosα=p_a/(ρ_0 c_0 ) cosα (9.1)
где α - угол между направлениями распространения звуковой и ультразвуковой волн.
Очевидно, что наибольшее изменение скорости ультразвуковой волны будет наблюдаться, когда обе волны распространяются в одном направлении (при синфазном давлении pa), когда cosα= 1. При этом длина звуковой волны должна быть гораздо больше длины волны ультразвукового колебания. В случае ортогонального пересечения (под прямым углом) этот эффект проявляться не будет, поскольку здесь cosα= 0.
Колебания скорости звука Δcρ, обусловленные изменениями средней плотности воздуха
Акустические волны, представляют собой периодические изменения среднего давления и плотности среды распространения. При выводе выражения для скорости звука из уравнения состояния изотропных газов, получается следующее:
c(ρ)=c_0+(c_0∙(γ-1))/(2ρ_0 )∙ρ (9.2)
где γ = cp/cv – показатель адиабаты, равный отношению удельной теплоемкости газа при постоянном давлении к удельной теплоемкости при постоянном объеме (для воздуха при температуреТ = 15°С γ = 1,402).
Второе слагаемое отражает искомую связь изменения скорости звука Δcρ в зависимости от изменения плотности воздуха ρ. Выразив плотность через звуковое давлениеpa, получим:
Δc_ρ = ((γ-1))/(2ρ_0 c_0 )∙p_a (9.3)
которое также справедливо только для звуковых волн большой длины в сравнении с измеряемой величиной ультразвуковой волны.
Полное изменение скорости звука Δсполучим, суммируя (9.1) и (9.3):
∆c=c_m+c_ρ=(2 cos〖(α)+γ-1〗)/(2ρ_0 c_0 )∙p_a (9.4)
Интересно, что при некоторой величине угла α= 103º изменение скорости Δc исчезнет, что может быть легко продемонстрированов ходе практических экспериментов
9.2. ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
ВИРТУАЛЬНОГО МИКРОФОНА
Для измерений в процессе проведения экспериментальных исследований свойств виртуальных микрофонов, как уже говорилось, была использована схема, показанная на рис. 9.1.
Длина пути, по которому распространяется ультразвуковая волна,здесь значительно больше, чем длина звуковой волныλa. Поэтому величина изменения скорости звука в каждой рассматриваемой точке зависит от ее фактической позиции x вдоль линии между массивом излучателей (передатчиком) и микрофоном (приемником):
∆c(x,t)=(2 cos〖(α(x))+γ-1〗)/(2ρ_0 c_0 )∙p_a (x,t) (9.5)
Угол α между направлениями распространения звуковой и ультразвуковой волн также является функцией от рассматриваемой позиции х на пути ультразвукового луча. Чтобы получить выражение для полного изменения скорости звука (выраженного как сдвиг фазы Δϕ(t)), уравнение (10.5) должно быть проинтегрировано вдоль всей длины пути L распространения ультразвукового луча:
∆ϕ(t)=∫_0^L▒1/(c_0+∆c(x,t+x/c_0 ) ) dx-L/c_0 (9.6)
Зависимости величин Δϕ(t) от частоты, полученной в ходе эксперимента по схеме, представленной на рис. 9.1, и вычисленной с помощью (9.6), показанынарис. 9.3.
На рассчитанной характеристике видна легкая рябь, и поведение ее сходно с поведением частотной характеристики фильтра низких частот первого порядка. Для проверки расчетов,эксперимент был проведен заново, но в качестве звукового сигнала использовался сигнал скользящего тона от 100 Гц до 10 кГц длительностью 5с и уровнем 80 дБ.Записанный микрофоном ультразвуковой сигналзатем был демодулирован для получения значений звукового давления на каждой частоте. Полученный результат также представлен на рис. 9.3. Наблюдается хорошее сходство теоретических и практических результатов. Различия на низких частотах объясняются переходными характеристиками в источнике звука. Поскольку степень модуляции очень низкая (величине 0 дБ соответствует эффективный фазовый сдвиг всего на 1,23 нс), в результатах, полученных путем измерения, отмечается довольно высокий уровень шумов.
Степень модуляции, очевидно, будет уменьшаться по мере перемещения источника звука в направлении оси y. На рис. 9.4 показана эта зависимость для различных частот звуковой волны. При небольших значениях d фазовый сдвиг уменьшается пропорционально 1/d в соответствии с реальной чувствительностью используемого микрофона, а для больших – значительно быстрее. Также этот эффект сильнее проявляется в области высоких частот.
Первичные исследования были направлены только на обнаружение синтетических сигналов с высоким уровнем звукового давления. Однако практическое применение виртуальных микрофонов, разумеется, состоит в том, чтобы использовать ультразвуковые волны для прослушивания нормальной человеческой речи на расстоянии. Ультразвуковая волна сама по себе действует здесь как приемник звука. Никаких технических средств, типа мембран микрофонов, здесь вблизи источника звука размещать не требуется (рис. 9.5). Поскольку такого рода приемник звука невидим и неосязаем, его и назвали виртуальным микрофоном. Особую сложность при решении такой задачи представляет собой детектирование очень слабой модуляции ультразвуковой волны с минимально возможными затратами.Повышенное внимание следует уделять следующим вопросам:
●генерируемая ультразвуковая волнадолжна иметь очень малые фазовые искажения;
● приемник сигнала (микрофон) должен обладать как можно более широким динамическим диапазоном;
● метод демодуляции принятого сигнала в реальном времени должен обеспечивать очень высокую точность.
Эксперименты по приему речевого сигнала с помощью виртуального микрофона показали, что для получения результата, сопоставимого по качеству с результатами, которые можно получить с помощью традиционных видов микрофонов, все его компоненты должныобеспечивать динамический диапазон не менее 120 дБ в интересующем диапазоне частот вокруг несущей частоты 40 кГц.
Первым препятствием, с которым пришлось столкнуться исследователям при попытке получения сигнала ультразвуковой волны с широким динамическим диапазоном, оказался микрофон-приемник ультразвуковой волны. Хотя использовавшийся для этих целей дорогой измерительный конденсаторный микрофон позволяет получать сигналы очень высокого качества, на рынке существует очень небольшое число доступных по цене ультразвуковых микрофонов, которые могут быть использованы в потребительской сфере. А поскольку их динамический диапазон никогда не достигает требуемых значений, они-то и являются самым ограничивающим элементом.
Для того чтобы попытаться как-то решить эту проблему, была использована следующая экспериментальная установка (рис. 9.6). В нескольких сантиметрах от микрофона-приемника размещался дополнительный ультразвуковой излучатель – с таким расчетом, чтобы излучаемые им колебания достигали микрофона-приемника, но сам он не перекрывал основной ультразвуковой луч. Оба излучателя, и основной, и дополнительный, питаются от одного генератора, однако излучение второго излучателя можно регулировать по фазе и амплитуде.
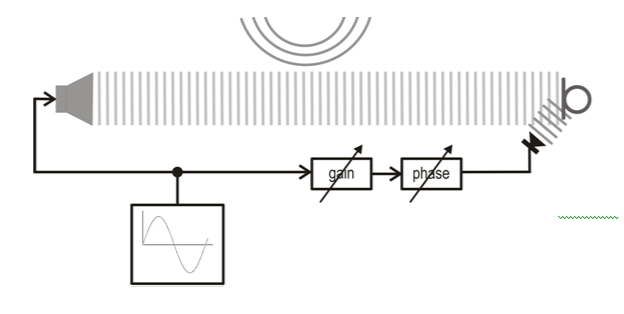
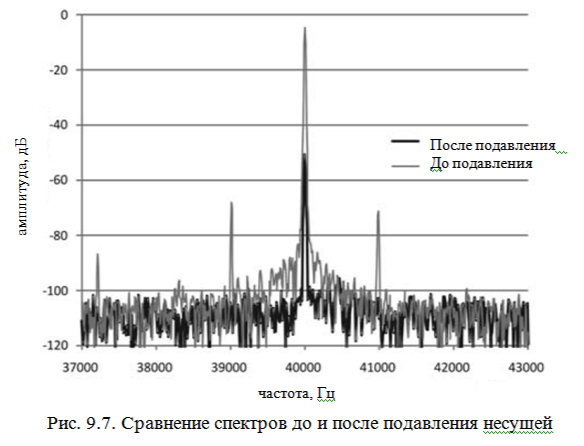
Когда излучение второго передатчика отрегулировано так, что оно находится в противофазе относительно излучения основного передатчика, несущая будет подавлена без изменения амплитуды модуляции, соответствующей высоте боковых лепестков. Таким образом, относительная модуляция возрастает, т.е. расстояние по вертикали между несущей и боковыми составляющими уменьшается (рис. 9.7).
В петле управления необходимо постоянно подстраивать фазу и ам-плитуду режекторного сигнала, чтобы добиться наилучшего подавления несущей. Особенно важно точно контролировать фазу сигнала, таким образом, чтобы не допустить искажения боковых составляющих.
В проводимых экспериментах уровень подавления несущей достигал величины 40 дБ без уменьшения абсолютной величины боковых составляющих. Как только удается уменьшить до необходимого уровня динамический диапазон для ультразвукового микрофона, все последующие компоненты обработки сигнала (особенно аналого-цифровой преобразователь) могут работать с облегченными требованиями. К сожалению, это не относится к генератору ультразвукового сигнала, а также к контроллеру фазы и амплитуды дополнительного сигнала.
9.3. ИСПОЛЬЗОВАНИЕ ОТРАЖЕННОГО СИГНАЛА
Весьма привлекательной выглядит идея, которая состоит в том, что весьма разумно было бы расположить излучатель и приемник в одном и том же месте. Ультразвуковая волна, отразившись от плоской поверхно-сти, например от стола или пола,вернется обратно и будет принята микрофоном. Тогда можно было бы конструктивно объединить передатчик и приемник в одном устройстве. Разместить такую систему можно, к примеру, на потолке, как показано на рис. 9.8.

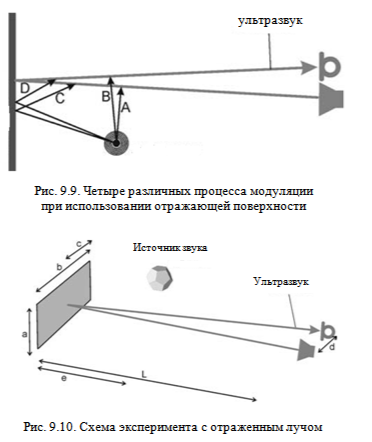
Ввиду того, что и ультразвук, и акустические колебания отражаются от поверхности, как показано на рис.9.9, рассматривать следует сразу четыре отдельных процесса взаимодействия волн. Прямая звуковая волна взаимодействует как с прямым, так и с отраженным ультразвуком (A и B), равно как и отраженная от поверхности звуковая волна (C и D). Всё это – четыре различных случая модуляции. Фазовый сдвиг зависит от длин путей, которые прошли ультразвук и звук до и после взаимодействия. Микрофон вначале детектирует модуляцию B, затем D, C и A. Глубина модуляции зависит от угла между направлениями распространения и от амплитуд звуковых волн. Эти параметры различаются в каждом конкретном случае A, B, C, и D. Также в зависимости от частоты звукового сигнала будет происходить либо усиление сигнала, либо его ослабление.
Для проведения эксперимента (установка изображена на рис. 9.10) в качестве отражающей поверхности была использована прямоугольная деревянная поверхность с размерами 1×0,5 м. Излучатель располагался на расстоянии L = 3,8 м от отражателя. Звуковой сигнал создавался специальным громкоговорителем, выполненным в форме додекаэдра, который располагался на расстоянии e = 0.95 м от отражающей плоскости и на расстоянии c = 0.5 м от точки падения ультразвукового луча на плоскость. Его диаметр равнялся 300 мм, а диаметр каждого динамика на каждой из его поверхностей – 80 мм. Зазор между излучателем и ультразвуковым микрофоном равен d = 0,2 м. В этот зазор была помещена пластинка изоляционного материала (на рисункене показана), для предотвращения прямой связи между передатчиком и приемником. В качестве звукового сигнала был использован сигнал скользящего тона 200-800 Гц. Принятый сигнал, со-держащий полученный в результате интермодуляции фазовый сдвиг, был демодулирован с целью выделения звукового сигнала. Поскольку на высоких частотах в данных условиях громкоговоритель уже не являлся бы точечным источником звука, поэтому в качестве наивысшей частоты здесь была использована частота 800 Гц.
Оххх.. Вот это я прочитала!!!
Потравде , ничего не понятно, но интересно, пыталась, но я в этом плохо совсем разбираюсь.
Я в этом плохо понимаю, точнее это вообще не моё, но честно было интересно прочитать
У Вас познания на Нобелевскую премию Поскольку на высоких частотах в данных условиях громкоговоритель уже не являлся бы точечным источником звука, поэтому в качестве наивысшей частоты здесь была использована частота 800 Гц.
Поскольку на высоких частотах в данных условиях громкоговоритель уже не являлся бы точечным источником звука, поэтому в качестве наивысшей частоты здесь была использована частота 800 Гц.
Интересная публикация.
Как всё сложно.
Вы думаете, что это кто-то поймёт?
Не думаю. Рассчитано на тех, кто поймет...